Hệ điều khiển PLC - Biến tần - Động cơ không đồng bộ ba pha (P1)
Trong các nhà máy xi măng, chúng ta thường gặp bộ ba: Bộ điều khiển lô gíc có thể lập trình (PLC-Programmable logic controller) - biến tần - động cơ nhưng mối quan hệ điều khiển của bộ ba này xảy ra nhưng thế nào? Vai trò của nó ra sao ? Bài viết sau đây sẽ một phần nào đó làm sáng tỏ vấn đề nêu trên.
>> Hệ điều khiển PLC - Biến tần - Động cơ không đồng bộ ba pha (P2)
Trước kia, khi khoa học kỹ thuật chưa thực sự phát triển thì vấn đề điều chỉnh và ổn định tốc độ động cơ xoay chiều gặp nhiều khó khăn, phạm vi ứng dụng hệ điều chỉnh này hẹp, hầu hết đều sử dụng động cơ một chiều do đặc tính điều chỉnh đơn giản. Tuy nhiên, động cơ xoay chiều không đồng bộ có những ưu điểm mà các động cơ khác không có: giá thành rẻ, dễ vận hành, có thể làm việc trong môi trường dễ cháy nổ, liên tục và dài hạn, đấu nối trực tiếp với nguồn lưới điện ba pha…Nhờ những ưu điểm này mà các động cơ không đồng bộ xoay chiều ba pha được sử dụng ngày càng rộng rãi và đặc biệt là trong ngành xi măng của chúng ta.
Do đặc thù của ngành công nghiệp xi măng, các động cơ sẽ được thiết kế để hoạt động liên tục, dài hạn trong thời tiết rất nóng và độ ẩm cao. Vì vậy yêu cầu đặt ra cho các động cơ này phải có hiệu suất và độ tin cậy, dễ lắp đặt và bảo dưỡng. Thông thường, các động cơ hạ áp thường là các động cơ xoay chiều ba pha rô to lồng sóc, với công suất từ 75kW trở lên trang bị bộ khởi động mềm hoặc biến tần để khởi động dễ dàng, giảm dòng khởi động và không gây biến động lớn cho điện áp nguồn cung cấp. Mặt khác, theo báo cáo của dự án “Đánh giá tiết kiệm năng lượng” tháng 9 năm 2009, nếu chúng ta lắp đặt bộ biến tần có thể tiết kiệm ít nhất đến 30% lượng năng lượng tiêu thụ. Trong phạm vi bài viết này, chúng tôi chỉ đề cập đến bản chất quá trình điều khiển Biến tần - động cơ và quá trình điều chỉnh ổn định tốc độ động cơ trong hệ PLC - biến tần - động cơ.
1. Bản chất quá trình điều khiển PLC - biến tần - động cơ
Trước hết chúng ta cần hiểu khái niệm về hệ thống điều khiển bám - đó là hệ thống tự động điều chỉnh dùng để lặp lại một giá trị thay đổi theo quy luật bất kỳ nào đó. Đặc điểm của hệ này là tín hiệu điều khiển (hay còn gọi là tín hiệu vào) ngẫu nhiên và thay đổi theo thời gian, tín hiệu ra thay đổi theo đúng quy luật của tín hiệu vào với độ chính xác nhất định.
Trước kia, động cơ điện một chiều được sử dụng rộng rãi trong các hệ thống điều khiển truyền động là do có thể điều khiển độc lập hai thành phần dòng tạo từ thông (dòng điện kích từ) và dòng tạo mômen quay (dòng phần ứng), hai dòng này điều chỉnh độc lập, điều khiển đơn giản và thời gian tính toán không lớn.
Bài toán điều khiển động cơ một chiều: Phương trình đặc tính cơ của động cơ điện một chiều: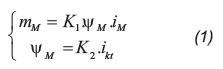 Trong đó:
Trong đó:
mM : Mômen phần ứng của động cơ
 M: Từ thông phần ứng của động cơ
M: Từ thông phần ứng của động cơ
iM, ikt: Dòng điện phần ứng và dòng điện kích từ
K1, K2: là các hệ số của động cơ
Như vậy, điều khiển từ thôngM của động cơ một chiều phụ thuộc vào dòng kích từ ikt, dòng này được sử dụng để điều khiển động cơ theo hàm  M=f(ikt). Thông thường, khi động cơ làm việc, M luôn được giữ ổn định M =đm. Trong trường hợp
M=f(ikt). Thông thường, khi động cơ làm việc, M luôn được giữ ổn định M =đm. Trong trường hợp  M dao động trong một khoảng nào đó -> mômen M cũng tỷ lệ thuận với dòng điện phần ứng iM . Do đó, theo hai phương trình trên, ta thấy việc điều chỉnh từ thông và mômen quay cho động cơ trực tiếp bằng điều chỉnh kích từ ikt và dòng điện phần ứng iM.
M dao động trong một khoảng nào đó -> mômen M cũng tỷ lệ thuận với dòng điện phần ứng iM . Do đó, theo hai phương trình trên, ta thấy việc điều chỉnh từ thông và mômen quay cho động cơ trực tiếp bằng điều chỉnh kích từ ikt và dòng điện phần ứng iM.
Trở lại bài toán điều khiển động cơ xoay chiều ba pha không đồng bộ, do hệ thống cuộn dây và nguồn cấp điện ba pha, động cơ xoay chiều ba pha có cấu trúc phức tạp nên ta thấy rằng có rất nhiều tham số cần điều chỉnh (6 tham số) khiến cho bài toán điều khiển khó khăn trong việc cách ly các tham số điều khiển và xây dựng mô hình điều khiển. Đối với động cơ xoay chiều, bài toán đặt ra là làm thế nào để có thể dễ dàng điều khiển được tốc độ của nó như việc điều khiển của động cơ một chiều?
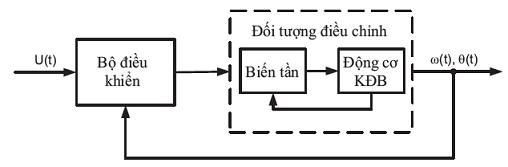
Hình 1: Sơ đồ cấu trúc của hệ bám động cơ không đồng bộ
Phương pháp điều chỉnh tốc độ động cơ, đối với hệ PLC - biến tần - động cơ thì điều chỉnh tốc độ động cơ bằng cách thay đổi tần số. Cấu trúc của hệ truyền động này là điều khiển tựa theo từ thông roto.
Trong hệ điều khiển này, ta coi biến tần - động cơ là một khối đối tượng cần điều chỉnh và bộ điều khiển ở đây là máy tính hoặc PLC.
Trong đó, tín hiệu vào là điện áp và tần số, tín hiệu ra là tốc độ và vị trí của động cơ.
PLC thực hiện thu thập các tín hiệu về dòng điện, vị trí góc, tốc độ…Trong đó, tín hiệu vào là điện áp và tần số, tín hiệu ra là tốc độ và vị trí của động cơ.
Biến tần thực hiện biến đổi điện áp xoay chiều ba pha của nguồn điện thành điện áp một chiều nhờ bộ chỉnh lưu cầu ba pha. Nhờ bộ nghịch lưu, điện áp một chiều sẽ đổi thành điện áp xoay chiều ba pha theo phương pháp điều chế độ rộng xung. Tín hiệu của biến tần có dạng sin (nếu sử dụng biến tần dòng) hoặc có dạng xung vuông nối tiếp (nếu sử dụng biến tần áp), từ đó đưa tín hiệu điều chỉnh tốc độ động cơ mong muốn.
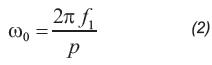
Trong đó: f1 là tần số của lưới điện, p là số đôi cặp cực của động cơ.
Hình 2: Mô hình điều khiển động cơ bằng biến tần
Trong quá trình làm việc, tần số thay đổi dẫn đến tốc độ động cơ thay đổi theo công thức (1), tần số tỷ lệ thuận với tốc độ động cơ
Hình 3: Đặc tính cơ của động cơ không đồng bộ ba pha khi thay đổi tần số kết hợp với thay đổi điện áp.
Trước kia, khi khoa học kỹ thuật chưa thực sự phát triển thì vấn đề điều chỉnh và ổn định tốc độ động cơ xoay chiều gặp nhiều khó khăn, phạm vi ứng dụng hệ điều chỉnh này hẹp, hầu hết đều sử dụng động cơ một chiều do đặc tính điều chỉnh đơn giản. Tuy nhiên, động cơ xoay chiều không đồng bộ có những ưu điểm mà các động cơ khác không có: giá thành rẻ, dễ vận hành, có thể làm việc trong môi trường dễ cháy nổ, liên tục và dài hạn, đấu nối trực tiếp với nguồn lưới điện ba pha…Nhờ những ưu điểm này mà các động cơ không đồng bộ xoay chiều ba pha được sử dụng ngày càng rộng rãi và đặc biệt là trong ngành xi măng của chúng ta.
Do đặc thù của ngành công nghiệp xi măng, các động cơ sẽ được thiết kế để hoạt động liên tục, dài hạn trong thời tiết rất nóng và độ ẩm cao. Vì vậy yêu cầu đặt ra cho các động cơ này phải có hiệu suất và độ tin cậy, dễ lắp đặt và bảo dưỡng. Thông thường, các động cơ hạ áp thường là các động cơ xoay chiều ba pha rô to lồng sóc, với công suất từ 75kW trở lên trang bị bộ khởi động mềm hoặc biến tần để khởi động dễ dàng, giảm dòng khởi động và không gây biến động lớn cho điện áp nguồn cung cấp. Mặt khác, theo báo cáo của dự án “Đánh giá tiết kiệm năng lượng” tháng 9 năm 2009, nếu chúng ta lắp đặt bộ biến tần có thể tiết kiệm ít nhất đến 30% lượng năng lượng tiêu thụ. Trong phạm vi bài viết này, chúng tôi chỉ đề cập đến bản chất quá trình điều khiển Biến tần - động cơ và quá trình điều chỉnh ổn định tốc độ động cơ trong hệ PLC - biến tần - động cơ.
1. Bản chất quá trình điều khiển PLC - biến tần - động cơ
Trước hết chúng ta cần hiểu khái niệm về hệ thống điều khiển bám - đó là hệ thống tự động điều chỉnh dùng để lặp lại một giá trị thay đổi theo quy luật bất kỳ nào đó. Đặc điểm của hệ này là tín hiệu điều khiển (hay còn gọi là tín hiệu vào) ngẫu nhiên và thay đổi theo thời gian, tín hiệu ra thay đổi theo đúng quy luật của tín hiệu vào với độ chính xác nhất định.
Trước kia, động cơ điện một chiều được sử dụng rộng rãi trong các hệ thống điều khiển truyền động là do có thể điều khiển độc lập hai thành phần dòng tạo từ thông (dòng điện kích từ) và dòng tạo mômen quay (dòng phần ứng), hai dòng này điều chỉnh độc lập, điều khiển đơn giản và thời gian tính toán không lớn.
Bài toán điều khiển động cơ một chiều: Phương trình đặc tính cơ của động cơ điện một chiều:
mM : Mômen phần ứng của động cơ
M: Từ thông phần ứng của động cơiM, ikt: Dòng điện phần ứng và dòng điện kích từ
K1, K2: là các hệ số của động cơ
Như vậy, điều khiển từ thông
M của động cơ một chiều phụ thuộc vào dòng kích từ ikt, dòng này được sử dụng để điều khiển động cơ theo hàm M=f(ikt). Thông thường, khi động cơ làm việc, M luôn được giữ ổn định M =đm. Trong trường hợp M dao động trong một khoảng nào đó -> mômen M cũng tỷ lệ thuận với dòng điện phần ứng iM . Do đó, theo hai phương trình trên, ta thấy việc điều chỉnh từ thông và mômen quay cho động cơ trực tiếp bằng điều chỉnh kích từ ikt và dòng điện phần ứng iM.Trở lại bài toán điều khiển động cơ xoay chiều ba pha không đồng bộ, do hệ thống cuộn dây và nguồn cấp điện ba pha, động cơ xoay chiều ba pha có cấu trúc phức tạp nên ta thấy rằng có rất nhiều tham số cần điều chỉnh (6 tham số) khiến cho bài toán điều khiển khó khăn trong việc cách ly các tham số điều khiển và xây dựng mô hình điều khiển. Đối với động cơ xoay chiều, bài toán đặt ra là làm thế nào để có thể dễ dàng điều khiển được tốc độ của nó như việc điều khiển của động cơ một chiều?
Hình 1: Sơ đồ cấu trúc của hệ bám động cơ không đồng bộ
Phương pháp điều chỉnh tốc độ động cơ, đối với hệ PLC - biến tần - động cơ thì điều chỉnh tốc độ động cơ bằng cách thay đổi tần số. Cấu trúc của hệ truyền động này là điều khiển tựa theo từ thông roto.
Trong hệ điều khiển này, ta coi biến tần - động cơ là một khối đối tượng cần điều chỉnh và bộ điều khiển ở đây là máy tính hoặc PLC.
Trong đó, tín hiệu vào là điện áp và tần số, tín hiệu ra là tốc độ và vị trí của động cơ.
PLC thực hiện thu thập các tín hiệu về dòng điện, vị trí góc, tốc độ…Trong đó, tín hiệu vào là điện áp và tần số, tín hiệu ra là tốc độ và vị trí của động cơ.
Biến tần thực hiện biến đổi điện áp xoay chiều ba pha của nguồn điện thành điện áp một chiều nhờ bộ chỉnh lưu cầu ba pha. Nhờ bộ nghịch lưu, điện áp một chiều sẽ đổi thành điện áp xoay chiều ba pha theo phương pháp điều chế độ rộng xung. Tín hiệu của biến tần có dạng sin (nếu sử dụng biến tần dòng) hoặc có dạng xung vuông nối tiếp (nếu sử dụng biến tần áp), từ đó đưa tín hiệu điều chỉnh tốc độ động cơ mong muốn.
Trong đó: f1 là tần số của lưới điện, p là số đôi cặp cực của động cơ.
Hình 2: Mô hình điều khiển động cơ bằng biến tần
Trong quá trình làm việc, tần số thay đổi dẫn đến tốc độ động cơ thay đổi theo công thức (1), tần số tỷ lệ thuận với tốc độ động cơ
Hình 3: Đặc tính cơ của động cơ không đồng bộ ba pha khi thay đổi tần số kết hợp với thay đổi điện áp.
Thực tế, trong quá trình điều chỉnh tốc độ của động cơ bằng phương án thay đổi tần số thường kết hợp với điện áp phần cảm đặt vào sao cho .

Để đơn giản hóa điều khiển các tham số đó, thuật toán điều khiển đưa ra nhằm mục đích tách riêng điều khiển độc lập giữa mô men và từ thông, phải có một hệ thống tính toán cực nhanh và chính xác trong việc quy đổi các giá trị xoay chiều về các biến đơn giản. Người ta đã xây dựng các khái niệm về vec tơ dòng điện, điện áp, từ thông trong không gian cho cả rô to và stato để tối ưu hóa các tham số điều khiển phức tạp đó rồi ứng dụng phương pháp điều khiển động cơ một chiều theo hai tham số trong phương trình (1) ở trên.
Vì vậy, phương pháp điều khiển động cơ xoay chiều tựa theo từ thông rôto được coi là một phương pháp tối ưu trong vấn đề điều khiển động cơ không đồng bộ ba pha. Trên cơ sở đó, các tham số điều khiển: dòng điện, điện áp, từ thông mạch stato, mômen, tốc độ… của động cơ được biến đổi qua trục toạ độ từ thông rôto cho phép điều khiển từ thông và momen hoàn toàn độc lập với nhau thông qua điều khiển giá trị tức thời của dòng (động cơ tiếp dòng) hoặc giá trị tức thời của điện áp (động cơ tiếp áp). Phương pháp điều khiển vector cho phép tạo ra những phản ứng nhanh, chính xác của cả từ thông và momen trong cả quá trình quá độ cũng như quá trình xác lập của máy điện xoay chiều giống như máy điện một chiều.
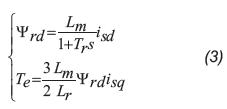
Bằng phương pháp này, ta nhận được mối liên hệ giữa từ thông và mômen quay của động cơ không đồng bộ như sau:
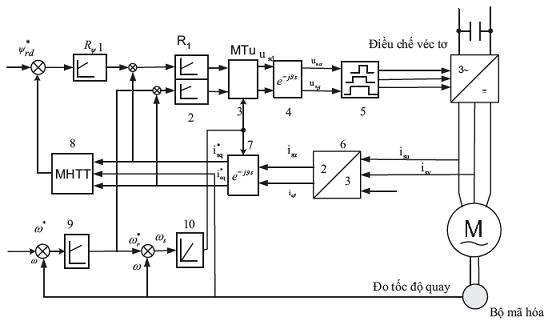
Hình 4: Sơ đồ cấu trúc hệ truyền động KĐB điều chỉnh tựa từ thông rôto.
(Cấu trúc này được xây dựng dựa trên phương pháp điều khiển động cơ tựa theo từ thông rôto).
Trong đó:
*s |*s| M* : là tốc độ đặt, từ thông đặt và mômen đặt.- Khối 1: Là khâu thực hiện điều chỉnh dòng từ thông.
- Khối 2: Khâu thực hiện hiệu chỉnh dòng và từ thông độc lập theo PID
- Khối 3: Mạng tính điện áp (thực hiện tính điện áp ra usd và usq từ đại lượng đầu ra của khối 1)
- Khối 4: Thực hiện hiệu chỉnh điện áp chuyển từ trục toạ độ dq sang αβ khi biết trước góc

- Khối 5: Thực hiện điều chế vectơ không gian điện áp đặt lên cực của động cơ tạo ra các biên độ pha, tần số cho khâu điều chỉnh dòng. Ngoài ra khâu này còn thực hiện tính toán thời gian đóng cắt thiết bị điện tử công suất đưa tín hiệu xung ra điều khiển biến tần.
- Khối 6: Thực hiện chuyển đổi dòng điện ba pha sang dòng điện hai pha.
- Khối 7: Thực hiện chuyển ngược lại từ trục αβ sang trục dq.
- Khối 8: Mô hình toán từ thông (MHTT) có chức năng tính toán giá trị thực của từ thông và góc
 . Ta coi động cơ không đồng bộ là một đối tượng điều chỉnh đa thông số.
. Ta coi động cơ không đồng bộ là một đối tượng điều chỉnh đa thông số.Mạch vòng trong điều khiển gồm có các khâu điều chỉnh dòng (khối 2), chuyển tọa độ điện áp (khối 4), điều chỉnh vectơ không gian (khối 5) hoàn toàn tương tự nhau.
Mạch vòng ngoài gồm khâu điều chỉnh vị trí và điều chỉnh tốc độ .
Hệ điều khiển PLC - biến tần - động cơ là hệ điều khiển bám tốc độ (vị trí). Khâu điều chỉnh góc (
 ) và điều chỉnh tốc độ quay () thông qua đặc tính điều chỉnh PID, điều chỉnh PI hoặc điều chỉnh hệ số tỷ lệ (P) như hình trên. Từ sơ đồ cấu trúc hệ truyền động động cơ không đồng bộ ba pha điều chỉnh tựa theo từ thông roto, ta có mô hình cấu trúc hệ điều khiển vị trí của hệ này như hình dưới:
) và điều chỉnh tốc độ quay () thông qua đặc tính điều chỉnh PID, điều chỉnh PI hoặc điều chỉnh hệ số tỷ lệ (P) như hình trên. Từ sơ đồ cấu trúc hệ truyền động động cơ không đồng bộ ba pha điều chỉnh tựa theo từ thông roto, ta có mô hình cấu trúc hệ điều khiển vị trí của hệ này như hình dưới: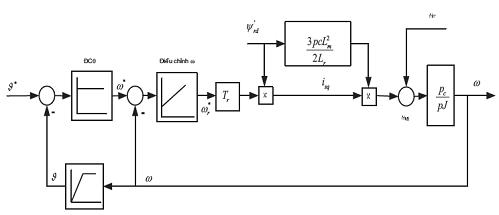
Hình 5: Cấu trúc hệ truyền động điều khiển vị trí động cơ KĐB.
Như vậy ta có sơ đồ cấu trúc tổng quát hệ điều khiển vectơ động cơ không đồng bộ điều khiển theo toạ độ từ thông rôto điều chỉnh tốc độ, từ thông mạch stato, vị trí định hướng theo vectơ từ thông roto.
ximang.vn * (Nguồn: Tạp chí Thông tin KHCN-Vicem)